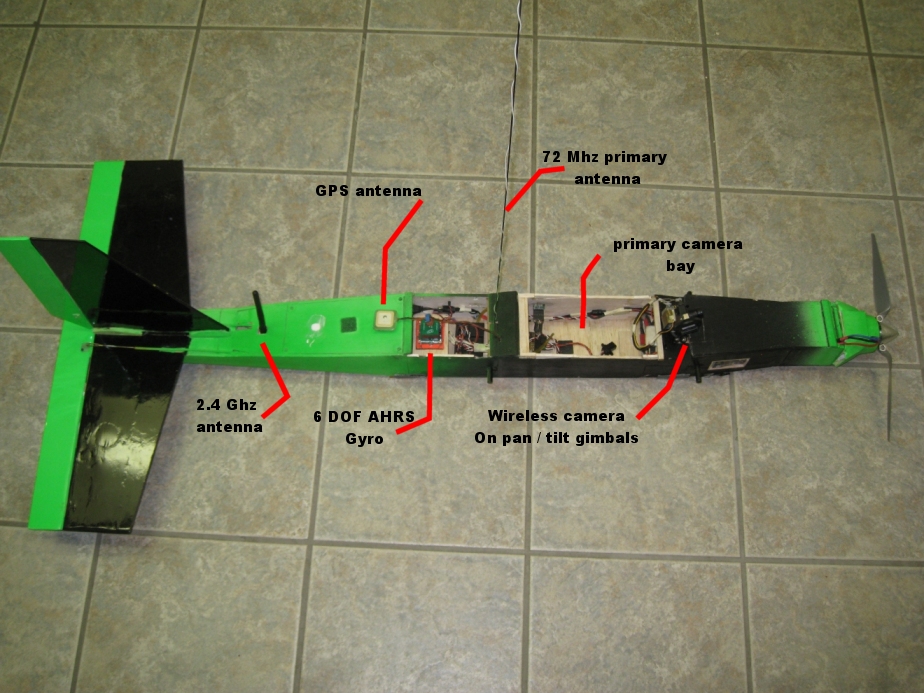
Systems layout can be seen above. This UAV
is great for small areas. Fast deployment and simple operation and
inexpensive design make this UAV great for small or hazardous ( unimproved natural landing zones ) jobs.
The wireless camera can be seen in the above layout it is on a pan and
tilt setup allowing full
range of viewing freedom and records to a ground base station
tape.
This plane has a fully autonomous navigation system. allowing for fully automated image collection over a user defined path. Stabilization
is achieved through the use of a 6 degree of freedom altitude heading reference system / internal measurement unit (AHRS/ IMU).
The primary camera can be triggered at set location or over a time or distance interval.